The 2022 Idea and project competition of the IMEAK Chamber of Shipping championship awarded project is based on a dangerous acidification scenario expected in the Mediterranean as soon as 2028 by a multinational group of scientific studies supported by the EU.
What is the Poseidon Project?
The scarcity of scientific data in the Eastern Mediterranean especially in the Levantine Sea has come to the fore, due to the realities of global climate change, a possibility that can be foreseen for further dates. At the point where the research that can be done in the region points to a very difficult process in terms of time and cost, the research and design process for the low-cost, light scientific research boat accelerated, and prototype production was carried out in 2020, which was intellectually researched just before the pandemic period.
A mechanism that can take dynamic position and works autonomously
The research boat is designed to work in the near coastal area and has been prepared as a mechanism that works autonomously and can take a dynamic position to conduct research and mapping on Vermedite Reefs and Posedonia Oceanicas, which are considered as the salvation of the oceans in the literature.
The boat was completed without any financial aid and the marine tests of the boat were carried out on the Karakum Beach of Girne on August 19th, 2022. The project will start collecting data on the western coasts of the TRNC as of September 15th to conduct a group of scientific research, which project is thought to be called “A Drop of Mediterranean”.
What are the Technical Specifications of the Poseidon Boat?
The hull of the boat, which is a composite trimaran, has a total weight of 21 kg and a total of 39 kg with its existing scientific equipment and batteries. After the selection is made on all known electronic mapping programs that can be installed by one person, it can perform its measurement tasks by self-delivery to the region with four (4) aero-prop propellers and return to any planned point or exit point.
The propulsion system, which consists of 15000 Rpm reversible propellers, reduces underwater losses and eliminates the need for rudders, as well as one of the most important features that reveal the low-cost possibility.
The power system of the boat, which has brushless engines that can change revolutions per second with frequency control, consists of 2 LI-PO batteries of 8500 mAh.
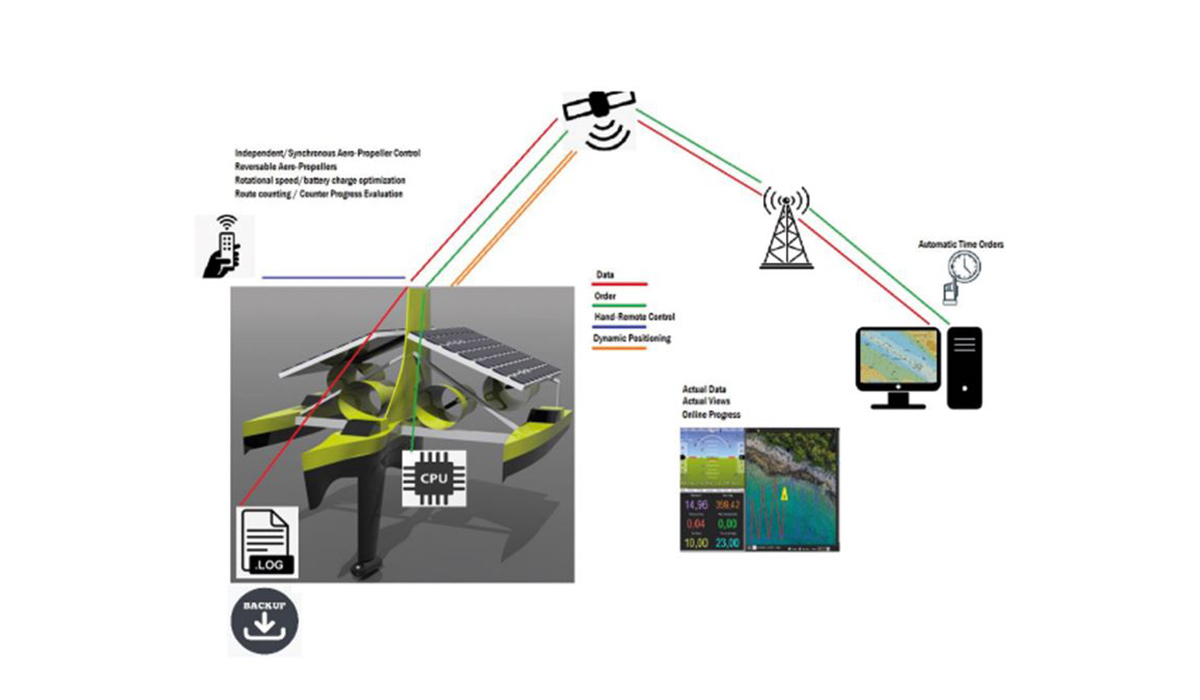
It works completely over GSM, GPRS or Wi-fi network
It also has an autonomous propulsion system that can operate entirely over the GSM, GPRS, or Wi-fi network and a sonar capable of instantaneously transmitting 3D mapping by measuring basic scientific data such as pH, water layer temperatures, pressure, air pressure, ultraviolet light refraction, infrared light transmission.
All these devices can be fed from 6Ah gel batteries with 2 solar panels and can collect data for 6 hours without daylight as designed. The operating system Phyton®, which can instantly measure wind and wave/sea conditions and decide on navigational safety or critical return, has been designed and algorithm software has been made on Pixhawk.
The boat has infrared cameras that can rotate 360 degrees surface and underwater, where all the scientific data collected can be viewed on the boat, in the Cloud, or on the management computer that monitors the transmission.
The draft of the boat is 160 mm max without a demountable fin, and a 1 cm submerged tonnage is 3.6 kg with an LOA of 1700 mm and an LBP of 1300 mm. Even if it carries an extra load of 31 kg at a single point with asymmetrical loading on its existing body, its balance does not deteriorate.
It was realized with the efforts of students from 8 different countries except for Turkey and TRNC
The possibility of loading up to 43 kg over the transverse metacenter makes it convenient to position a crane that can be used for benthic studies on the boat. The boat, whose middle hull is designed as 229 mm in Rhino, is suitable for printing on 230 mm printers, which is the cheapest type of 3D printer in electronic markets, to enable easy access for scientists who conduct scientific research with their means, and its hydrostatic calculations have been checked in NAPA.
The maximum cruising speed was tested as 4.7 m/s after the inclining tests. This very high cruising speed has been optimized to 2.8 m/s to extend the battery life.
Due to the sensitivity of the targets, the physical production of the boat was carried out voluntarily, entirely with the efforts of students from 8 different countries, besides Turkey and TRNC, who are candidates for ship machinery operation engineers.
What are the plans of POSEIDON and the Designer?
The boat, which is so sophisticated in terms of its design that cannot be compared with over 160 similar boats in the literature, is a flexible design that can collect much more needed data.
Copying the boat is one of my top goals, as it is designed to be 3D printed when necessary.
Another goal is to design the crane to be placed on the boat in a way that consumes much less energy than autonomous and similar ones to benefit from the load-carrying capacity and work with expert academics who can conduct benthic research.
On the other hand, it is aimed to produce another sampling system, whose conceptual design has been completed, as soon as possible and add it to the devices used in this boat, to benefit from the project by academics who are experts in the field of genetics.
POSEIDON will make it easier alone for expert researchers and will work to deliver many comparable data to theorists.
As we mentioned at the beginning, we have a goal of intensifying the effects of global climate changes, preparing processes for possible, imminent, and new threats, and solution proposals on the agenda.
Who is Volkan VARIŞLI?
Volkan VARIŞLI, who was born in 1977 in Ankara, completed his undergraduate education in ITU Maritime Faculty, Ship Machinery Management Engineering Department in 1999 and became the Chief Engineer at the beginning of 2002, working in Turkish and foreign maritime fleets.

Along with his naval life, he worked in the shipbuilding industry for eleven years in tanker construction, and also worked as a technical manager and assistant general manager in ship management.
After serving foreign fleets in the field of automation and machine systems retrofitting in the company he founded in 2012, he continued his master’s and doctoral studies at the University of Kyrenia, Maritime Transportation Management Engineering.
Continuing his belated academic life in TRNC, he is still the Head of the Department of Ship Machinery Management Engineering at the University of Kyrenia, and his academic studies on experimental biofouling on ship propellers and autonomous surface boats. Varışlı is married and has a child.
Technical Specification
LOA: 1700 mm
Breadth:1700 mm
Design Draft: 640 mm / 160 mm (With detachable fin)
Design Light Weight: 32 kg (Including Basic Hardware Spec. Equipment)
Design Duty Weight: 46 kg
Design Cruising Range: 20-28 Nm/h (Without any re-charge) / Unlimited (With solar / GSM ranges)
Design Cruising Speed: 2,57- 3,60 m/s @ full speed
Max. Wave Height: 1 m
Max. Opposite Wind: 5 Kn.
Basic Hardware/Software Specifications
Propulsion mechanism: 4 x Aero-prop
Steering mechanism: Reversible Aero-props
Charging method: Solar energy (or external battery charger)
Power Source: 4 x Li-Po Battery (Expandable)
Emergency Power: Emergency battery source
Control of Mechanism: Autonomous / Map order / Remote
Remote Control Comp.: Windows / Mac(oS) / Linux
Internal Comm. Syst.: wi-fi / Bluetooth
External Comm. Syst.: GSM / GPRS
Data Comm. Syst.: GSM / GPRS
Mapping Source: GPS + GSM/GPS









